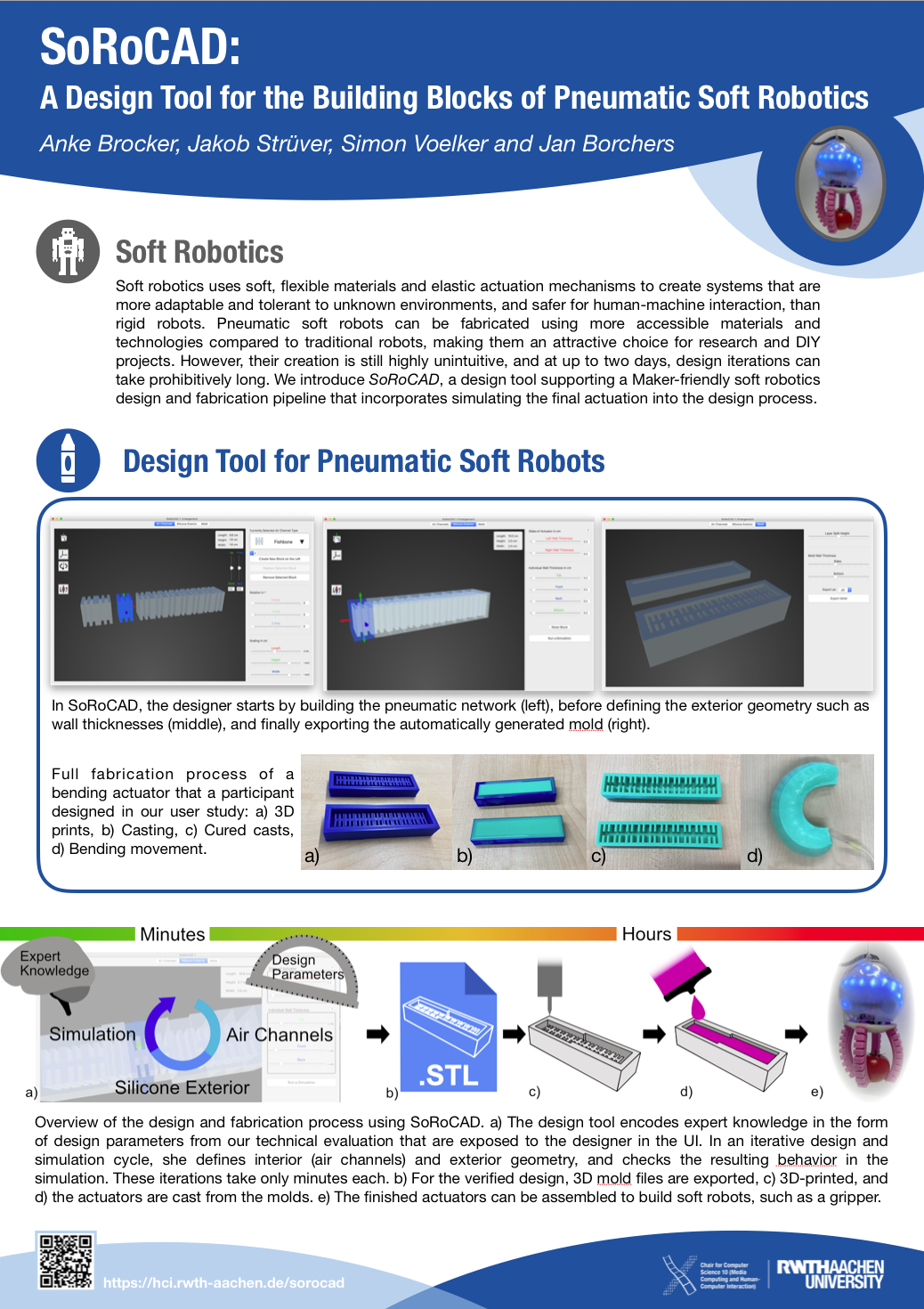
SoRoCAD: A Design Tool for the Building Blocks of Pneumatic Soft Robotics
LBW at ACM CHI '23: ACM Digital Libary Link
Abstract
We introduce a Personal Fabrication workflow to easily create feature-rich 3D objects with textile-covered surfaces. Our approach unfolds a 3D model into a series of flat frames with connectors, which are then 3D-printed onto a piece of fabric, and folded manually into the shape of the original model. This opens up an accessible way to incorporate established 2D textile workflows, such as embroidery, using color patterns, and combining different fabrics, when creating 3D objects. FabricFaces objects can also be flattened again easily for transport and storage. We provide an open-source plugin for the common 3D tool Blender. It enables a one-click workflow to turn a user-provided model into 3D printer instructions, textile cut patterns, and connector support. Generated frames can be refined quickly and iteratively through previews and extensive options for manual intervention. We present example objects illustrating a variety of use cases.
Video
Source
SoRoCAD is a GitLab project. If you would like to get access to the GitLab please contact me under:
Publications
- Philip Le. SoRoCAD 3.0: A Cross-Platform Approach to Soft Robotics Design. Bachelor's Thesis, RWTH Aachen University, Aachen, May 2024.

- Anke Brocker, Jakob Strüver, Simon Voelker and Jan Borchers. SoRoCAD: A Design Tool for the Building Blocks of Pneumatic Soft Robotics. In CHI Conference on Human Factors in Computing Systems Extended Abstracts, CHI EA '22, pages 7, Association for Computing Machinery, New York, NY, USA, April 2022.

- Sarah Sahabi. SoRoCAD 2.0: Extending a CAD Tool for Soft Robotics. Bachelor's Thesis, RWTH Aachen University, Aachen, April 2021.
- Jakob Strüver. Evaluating SoRoCAD: Enabling Users to Design Custom Soft Robotics. Master's Thesis, RWTH Aachen University, Aachen, October 2020.
- Kirill Timchenko. SoRoCAD: A Tool to Design Shape Changes in Soft Robotics. Bachelor's Thesis, RWTH Aachen University, Aachen, October 2019.
- Patrick Bayer. SoRoLib: Library of Building Blocks for Pneumatic Shape Changing in Soft Robotics. Master's Thesis, RWTH Aachen University, Aachen, September 2019.