Double 2 Telepresence Robot
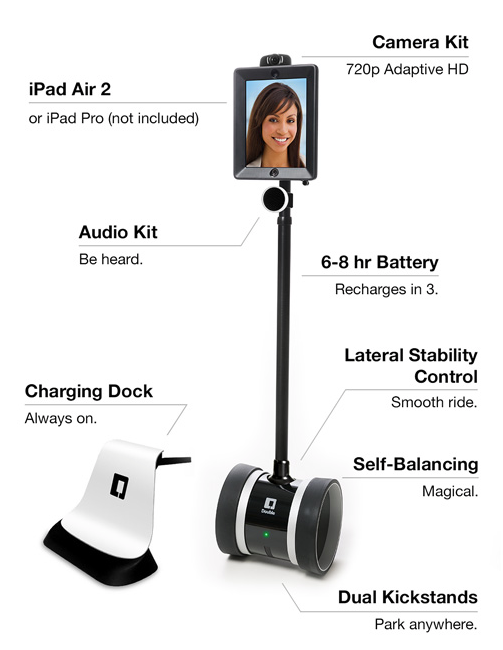
Our lab has a Double 2 telepresence robot from Double Robotics. It uses a balancing wheelbase like a Segway and an iPad for the head. The remote participant downloads the Double app from the App Store, creates an account with doublerobotics.com, then the local administrator adds that account to the Double's list of users. Now the remote participant can connect to the local Double in a video conference call using the app, and at the same time drive the local Double remotely using the same app.
For transport, the Double has a sturdy plastic case. To assemble it:
- Take the Double out while taking care not to break off it's front and rear parking legs if they are extended.
- Press the power button on the wheelbase to turn it on.
- Stand it on its wheels. It will balance itself.
- Attach the audio speaker unit: Push the large plastic plug into the top of the stand, then clip the speaker to the stand using the round plastic clip.
- Attach the iPad head with the supplied hex wrench and screw. Watch out: the camera is attached using magnets and comes off easily.
- Plug the microphone into the headphone socket on the bottom of the iPad, so the mike faces forward.
For more detailed instructions, go to setup.doublerobotics.com.
Other helpful hints:
- If the video seems slow, check that the Double's iPad is connected to a fast WiFi network. 5 GHz is the best because it is less busy. At our lab, use the i10 network.
- Moving between access points can disconnect the Double for a few seconds. Wait for the green dot to reappear, showing that it's connected again.
- Put the Double's iPad into Guided Access mode to avoid interruptions while the Double is in use.
- The Double can drive into its charging dock forwards or backward. When it's charged, its LED changes from orange to green. A charge takes 2-3 hours and lasts for 8 hours of operation. You can leave the Double and iPad on and in the dock ready to connect at all times, this won't damage the iPad or Double.
- Hit P on the app to extend the parking legs when the Double doesn't need to move around. This saves power.
- To adjust volume and to raise/lower the neck of the Double, drag the tiny white dots at the left and right edges of the app.
- Telepresence robots are a new social concept that needs some attention to make it work well. Check out this 3-minute video by WIRED for some basic "etiquette" rules of conduct for both the robot driver and the local colleagues. Basically, don't do anything to an active telepresence robot that you wouldn't also do to the person driving it. For example, don't touch it without asking.
Troubleshooting: Weak network
We call this mode Facetime+Double (a.k.a. Nur Mode). This mode should be activated if the video or sound hang several times while using the Double app, or to get superior video quality locally and remotely.
We recommend the remote user to use two devices, one for video and audio streaming and sharing, and one to control the robot movement and parking functions.
- Both the local and remote users should switch to the Facetime app and initiate a video call.
- On the robot: minimize Facetime view and open the Double app. The remote user should use another device, e.g., an iPhone, to launch the Double app.
- The remote user should connect to the robot via Double app and disable the microphone.
- On the robot: maximize Facetime to full screen.
In this mode, the robot microphone and speaker are still in use. (Make sure the robot speaker is set to full volume. Check the volume level of the iPad and the Double app.)
One limitation: the wide-angle camera on the robot will not work in this mode. The iPad built-in camera will be the one sourcing the local scene.
Relevant Links
- [For internal use: Double Robot guide]