
Sumit Gupta
External Master Thesis Student
This email address is being protected from spambots. You need JavaScript enabled to view it.
004917663159469
My Master Thesis Description
Magic Lens Tracking with Infrared Grid
This thesis focuses on real-time tracking of camera phoneson 2D surfaces, such as paper maps and poster boards. At Deutsche
Telekom Laboratories a tracking system hasbeen developed that enables camera phones to track their position on paper maps
or other paper documents in realtime (http://www.deutsche-telekom-laboratories.de/~rohs/ wikeye). The camera phone is used
as a “magic lens” to augment the static background surface with personalized up-to-date information. Overlay graphics are
precisely aligned with features in the background. This system requires the augmentation of the paper map with tiny dots to
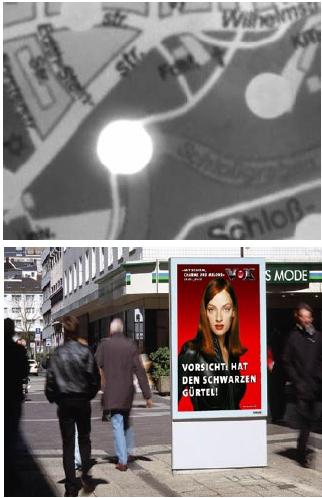
realize the camera-based tracking. One idea to improve this state is to replace the grid of printed dots by small infrared LEDs
that are placed behind the surface (see top figure) and serve as the grid points, e.g. integrated in a poster board (see bottom
figure). The advantage of this method would be that the grid points are now invisible to the human eye, but can still be captured
by the integrated camera of the phone. The bottom figure shows a hypothetical interactive poster board in the city, which would
allow for camera phone interaction without any special hardware. An advantage of this method is that the infrastructure costs
remain quite low. In the basic setup, just a grid of constantly illuminated infrared LEDs has to be installed, rather than an expensive
computer plus fixed camera.
The camera can observe the infrared LEDs as well as the visible structures on the paper map. In the thesis it should be investigated
whether the arrangement of grid points can itself serve to encode position and how this can be achieved (cf. Anoto pattern).
Moreover, each LED could itself transmit an identifier at half the camera’s frame rate (Nyquist theorem). This ID could encode the
map position as well as other information. Moreover, the developed infrared grid tracking approach should be compared to other
orthogonal tracking approaches (see the light sense project at http://www.csc.kth.se/~alx/).
Since the camera image will contain the bright spots of the LED lights the camera image will probably not be suited for display to the
user. Therefore it should be investigated in this thesis whether a virtual map can be appropriately scaled and translated to show the
focused part of the surface. The virtual image can be different from the background map (e.g. a satellite image on the device display
and a city map in the background) and is not bound to the field of view of the camera. The latter aspect provides an additional degree
of freedom to scale the map depending on z-axis position (distance from the phone camera to the surface). Interaction aspects related
to this zooming along the z-axis should be investigated in the thesis as well. Examples are finding suitable distance-to-zoom ratios and
effects of tracking reliability and delay on the usability of the system.
This Master Thesis will be carried out at Deutsche Telekom Laboratories at TU Berlin under supervision of:-
Supervisor in Deutsche Telekom Laboratories:- Dr. Michael Rohs
First Supervisor in RWTH Aachen University :- Prof.Dr.Jan Borchers
!!!! Second Supervisor in TU, Berlin :- Prof. Dr. Sebastian Möller